写在前面
因为对图形学比较感兴趣,前段时间陆续看了fundamentals of computer graphics、raytracing系列,了解了一些
图形学的基础知识,也手撸了一遍光追(丐中丐版)。出来的图的效果 看着还行 :
1000sample per pixel
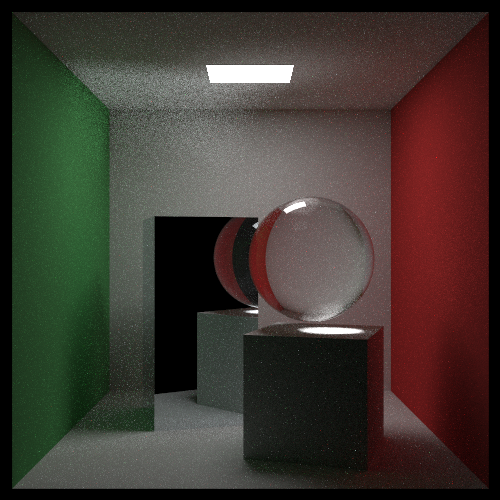
100sample per pixel
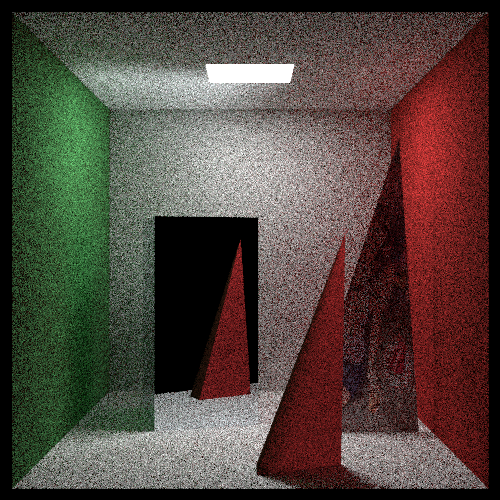
如前面所写的,我之前所了解的都是图形学中离线渲染的部分。可以看到,虽然光线追踪所呈现的效果相对真实,但 如果不加一些黑魔法优化的话,效率太低。我记得渲染第一张图时好像用了5min(600x600)...。离线渲染坑太 多,不是一时半会儿可以搞定的;图形学中还有另外一个分支实时渲染,就像名字中所描述的,效率大都能做到实时,也是 游戏开发的主力,但相对于基本遵循物理定律的光追,真实度方面肯定有所差距。
之前看到过文刀秋二大大的 一篇文章 ,正好这 学期了解了数据结构,与文中的背景基本相似。虽然大作业的题目并不是文中的“池塘夜雨”,但由于学校出的题目过于无聊, 索性就尝试一下,顺便学习一些实时渲染方面的知识。
先放上结果:
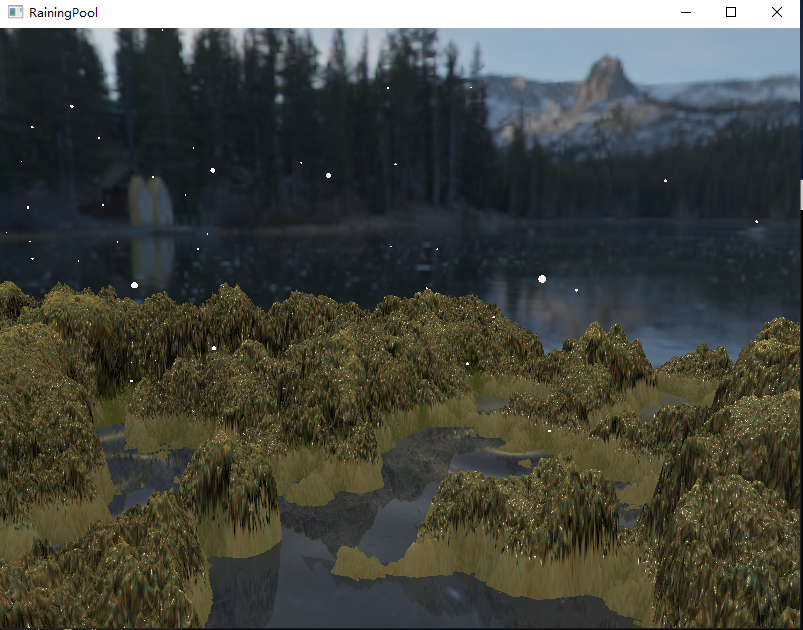
完成了:天空盒、基本的水面效果(折射反射)、波纹、pbr光照地形、雨点(指雪花)
环境需求:OpenGL3.3-32bit,相对应的GLFW,glm0.9
下面记录一下实现时卡住的地方
- 雨
记得我是从雨点开始着手这个程序的;一开始想用Geometry Shader给整成粒子特效,写出来之后发现跟想象的效果的差距 有点大,粒子完全就是个像素点,一点都不像雨;思来想去没有头绪,干脆直接用三角形画个球代替一下,于是就有了现在 这样圆形的雨(其实连飘落方式也给写成雪的形式了,或许叫池塘夜雪更合适- -)。思路比较简单,实时渲染中的物体实际是由无 数个三角形面片组成的,所以只需想象一下把N个三角形近似成一个球就明白了。想要OpenGL画一个模型,需要提供模型的顶点 数据,所以问题就变成给定球心和半径,求球面的任意一点的坐标。这时可以将球像地球仪一样按经线和纬线分割;经过切割 后球面可被近似看为由N个矩形组成,一个矩形又由两个三角形组成;计算实际就是球坐标转笛卡尔坐标。灵魂画图:

需要注意的是OpenGL中渲染三角形时按照顶点的顺序来区分正反面,默认逆时针为正面,顺时针为反面;在下面的反射会 用到。球坐标中的θ∈[0, π], φ∈[0,2π],代码如下。
void GetPoint(std::vector<float>& p,float u, float v, float r) {
constexpr float pi = glm::pi<float>();
float z = r * std::cos(pi * u);
float x = r * std::sin(pi * u) * std::cos(2 * pi * v);
float y = r * std::sin(pi * u) * std::sin(2 * pi * v);
p.push_back(x);
p.push_back(y);
p.push_back(z);
p.push_back(u);
p.push_back(v);
}
(std::vector<float>& vertex, size_t longitude, size_t latitude, float r) {
float longitude_step = 1.0f / longitude;
float latitude_step = 1.0f / latitude;
size_t offset = 0;
for (size_t lo = 0; lo < longitude; lo++) {
for (size_t lat = 0; lat < latitude; lat++) {
std::vector<float> point1, point2, point3, point4;
GetPoint(point1,lo * longitude_step, lat * latitude_step, r);
GetPoint(point2,(lo + 1) * longitude_step, lat * latitude_step, r);
GetPoint(point3,(lo + 1) * longitude_step, (lat + 1) * latitude_step, r);
GetPoint(point4,lo * longitude_step, (lat + 1) * latitude_step, r);
}
}
}
- 第二个解决的是天空盒
这里 的介绍非常详尽。需要注意的是 从Equirectangular Map转换到Cube Map时每次循环都要glclear清一下深度和颜色缓冲...之前就是因为漏写了这一句调试了一下午.. 说多了都是泪。
解决了雨点和天空盒后,能看到的效果是一个飘雨的广袤世界,就像这样:(天空盒资源取自 sIBL )

- 池塘夜雨,总不能少了池塘。
最初用的是视差贴图和法线贴图结合,效果也很不错;但视差贴图完全是视觉上的trick,并不是 真实的高度,而之后的水面的实现是在另一个平面上,与地形基本处于同一高度,两个平面的深度冲突会导致只能显示一个平面。 于是转为用displacement mapping实现;displacement mapping实际上就是根据高度图调整顶点位置,这样生成的地形的高度 是真实的,但缺点是如果面数不够生成的地形就会棱角分明,很难看。解决方法是增加面(三角形)的数量,但这样开销也会增大; 生成顶点的代码如下:
(size_t rowLen, size_t colLen) {
std::vector<glm::vec3> tv;
std::vector<glm::vec2> te;
size_t triangleNum = (rowLen - 1) * (colLen - 1) * 2;
double d = 2.0 / rowLen;
for (double z = -1.0; z < 1.0; z += d) {
for (double x = -1.0; x < 1.0; x += d) {
tv.push_back(glm::vec3(x, 0.0, z));
te.push_back(glm::vec2((x + 1.0) * 0.5, (z + 1.0) * 0.5)); // [-1.0,1.0]->[0.0,1.0]
}
}
题图为1023*1023*2个三角形,再加上法线贴图的效果。光照用了pbr+IBL, 这个教程
写的太好了,真正的 简单 易懂。
- 最后是水面,也是最复杂的了。
使用了平面反射来实现水面的反射效果,相比于Screen Space Reflection(SSR)和对cube map采样在 效率和效果上都有优势。SSR的原理是获取当前视空间的深度、法线等信息,然后在后处理阶段通过深度信息得出场景中物体的位置,再 通过光线步进的方式获取反射颜色。方式是从当前点出发,沿着反射方向步进直到碰到物体为止;反射方向可以由法线得到,物体碰撞 则用深度来判断;缺点也很明显,既然只有当前视空间的深度、法线信息,那视空间之外的物体肯定是没有反射了。因此在室外的场景 很容易出现反射缺失的情况。另一种反射方案是将当前场景渲染6次到一个cube map上,再对cube map采样;只是看描述就知道这玩意 开销有多大了,每帧6次..简单的场景还好说,复杂一点直接gg。
而平面反射的原理是将正常camera变换到对称与平面的位置,再用对称相机渲染场景一次作为reflect texture,然后对这个texture 采样就得到反射效果。要将正常camera转换到对称位置,需要一个反射矩阵,下面是公式推导和代码实现。

glm::mat4 result = glm::mat4(1.0);
float d = -glm::dot(normal, p);
result[0][0] = 1.0 - 2 * normal.x * normal.x;
result[0][1] = -2 * normal.x * normal.y;
result[0][2] = -2 * normal.x * normal.z;
result[0][3] = -2 * normal.x * d;
result[1][0] = -2 * normal.x * normal.y;
result[1][1] = 1.0 - 2 * normal.y * normal.y;
result[1][2] = -2 * normal.y * normal.z;
result[1][3] = -2 * normal.y * d;
result[2][0] = -2 * normal.x * normal.z;
result[2][1] = -2 * normal.z * normal.y;
result[2][2] = 1 - 2 * normal.z * normal.z;
result[2][3] = -2 * normal.z * d;
result[3][0] = 0;
result[3][1] = 0;
result[3][2] = 0;
result[3][3] = 1;
将获得的反射矩阵在观察空间中变换即可(先乘view再乘reflect);但这并不是最终结果。当物体在平面下时,反射贴图本应不显示物体 的反射虚像,但由于camera的frustum是下图的形式,所以依然会显示虚像,视觉上的效果是物体翻了个面。解决方法是将frustum的近 平面与反射平面平齐。如下,参考了 这个 。需要启用CULL FACE 将背面裁去,所以生成模型的时候顶点的顺序很重要。

glm::vec4 viewSpacePlane = glm::transpose(glm::inverse(reflectView)) * plane;
glm::vec4 ViewSpaceFraPlanePoint = glm::transpose(glm::inverse(projection)) * glm::vec4(sign(viewSpacePlane.x), sign(viewSpacePlane.y), 1, 1);
glm::vec4 M4 = glm::vec4(projection[3][0], projection[3][1], projection[3][2], projection[3][3]);
auto u = 2.0f * (glm::dot(M4,ViewSpaceFraPlanePoint) / glm::dot(ViewSpaceFraPlanePoint, viewSpacePlane));
auto newViewSpaceNearPlane = u * viewSpacePlane;
auto M3 = newViewSpaceNearPlane - M4;
//glm::vec4 M3 = 2.0f * (glm::dot(M4, ViewSpaceFraPlanePoint) / glm::dot(plane, ViewSpaceFraPlanePoint) * C) - M4;
projection[0][2] = M3.x;
projection[1][2] = M3.y;
projection[2][2] = M3.z;
projection[3][2] = M3.w;
- 数据结构的内容
写了个循环队列来控制雨点和波纹的逻辑;每一次渲染循环将雨点出队,修改位置后在入队;如果已经飘落到湖面上则重置雨点位置,然后 往波纹队列中增加一个波纹(在雨点飘落的位置,通过uniform传入shader)。同时将波纹出队,判断生命周期是否结束后入队。
最后
为什么是丐版?
因为真的就只是把文刀秋二大佬文章中的features做了出来而已..全部代码大概1000行多点, 完全就是屎山 ;最终效果一般而且
还有一些地方偷懒了。
因为之前完全没用过OpenGL,所以耗时比较长,一边学一边写总共用了一个多月。 不得不提OpenGL的api有点反直觉,用起来总有微妙的感觉。因为接近底层的缘故,坑非常多,刚开始的VAO,VBO,EBO折腾了好一会儿才 搞懂。api也相对原始,如果不适当抽象一下的话代码行数立马蹭蹭往上涨,过两天再看会觉得很痛苦。 最后就是写shader的时候没有任何语法提示,出错了只能看那短短几行的错误输出来定位..还好这次的shader并不复杂。
要说有什么收获的话,大概知道了单机游戏里的图形选项是怎么回事,以及消耗如何 代码水平提升了!
还有就是顺利地将这玩意当数据结构大作业交上去了=。=,有个开明的老师真的是非常幸运,
这一个多月的时间的价值最终还是体现出来了(指实质意义)
不然的话还要多花点时间在那几个莫名其妙的学校题目上 。
仓促间写的总结,应该会有很多纰漏,还有一些细节也没来得及写出来。学校的作业还没写完,然而我又想玩游戏了;;
steam上买了很久的游戏一次都没玩过... 我都花钱买了凭什么还要花时间去玩
总之有时间再改吧(
Disqus 留言